Toggle navigation
Videos
Webinars
Categories
FRAMECAD Know how software videos
Gated video
Training video
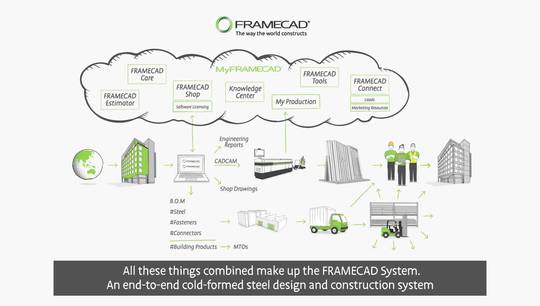
FRAMECAD Manufacturing System
FRAMECAD Software
Case Study
FRAMECAD Design and Build
About FRAMECAD
Home
FRAMECAD Design and Build
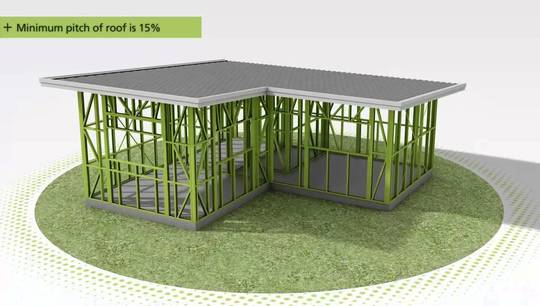
G+1 Residential Villa - Using the FRAMECAD System
G+1 Residential Villa - Using the FRAMECAD System
October 25, 2018
building system
,
framecad
,
G+1 residential
,
steel framing
,
Villa
Watch a G+1 residential home (villa) come together using the FRAMECAD steel framing design and build system
G+1 Residential Villa - Using the FRAMECAD System
0
Share
Embed
Embed this video
Related videos
04:00
FRAMECAD Design and Build
FRAMECAD - The Way the World Constructs
8,821 views
May 13, 2019
03:33
FRAMECAD Design and Build
FRAMECAD Estimator
4,162 views
December 14, 2018
01:46
FRAMECAD Manufacturing System
FRAMECAD Design and Build Overview Sequence
23,829 views
October 15, 2018
01:00
FRAMECAD Design and Build
Six Reasons Why Cold Formed Steel is a Superior...
15,812 views
November 21, 2018
07:00
FRAMECAD Design and Build
FRAMECAD System Overview
4,213 views
May 24, 2020
01:12
FRAMECAD Manufacturing System
FRAMECAD Construction Methodology
1,972 views
October 15, 2018